
Xây dựng hệ thống Real-time Multi-person Tracking với YOLOv3 và DeepSORT
Bài đăng này đã không được cập nhật trong 5 năm
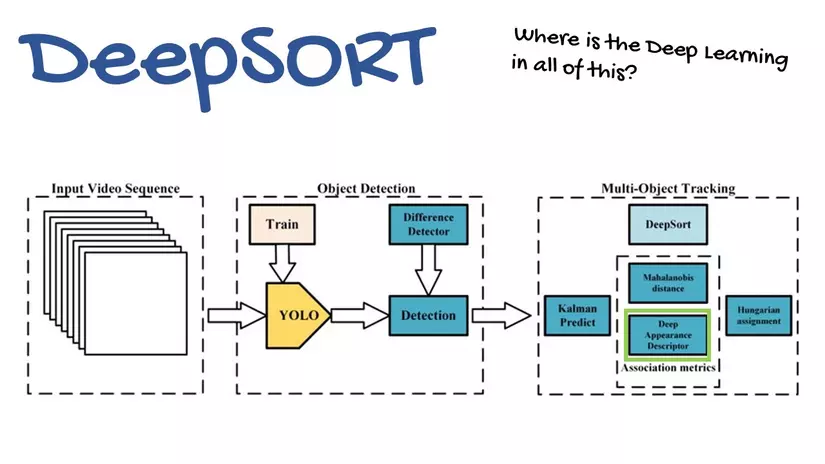
Trong bài này chúng ta sẽ xây dựng một hệ thống sử dụng YOLOv3 kết hợp với DeepSORT để tracking được các đối tượng trên camera, YOLO là một thuật toán deep learning ra đời vào tháng 5 năm 2016 và nó nhanh chóng trở nên phổ biến vì nó quá nhanh so với thuật toán deep learning trước đó, sử dụng YOLO trên GPU ta có thể đạt tới 45 fps. Dựa vào YOLO chúng ta sẽ detect được object rồi sau đó ta dùng DeepSORT để tracking object đó qua từng frames.
YOLO và DeepSORT
YOLO
Có lẽ YOLO đã không còn xa lạ gì với các bạn khi làm về chủ đề object detection. Trong bài viết này mình sẽ sử dụng YOLOv3, được kế thừa các tính năng từ v1 và v2. Nó sẽ dự đoán 4 tọa độ cho mỗi bounding boxs tx, ty, tw, th và dùng logistic regression để dự đoán confidence của mỗi object. Để tìm hiểu sâu hơn về lý thuyết mời bạn đọc bài Tìm hiểu về YOLO trong bài toán real-time object detection
DeepSORT
Để hiểu thế nào là DeepSort thì chúng ta sẽ tìm hiểu SORT - Simple Online Real-time Tracking là gì?
Và như cái tên của nó, SORT được sinh ra để có thể traking đối tượng trên thời gian thực dựa trên bốn yếu tố:
- Phát hiện đối tượng (Detection)
- Đánh giá và dự đoán (Estimation)
- Liên kết các đối tượng với nhau (Association)
- Theo dõi và huỷ bỏ danh tính đối tượng (Track Identity creation and destruction)
Về cơ bản SORT rất đơn giản và dễ implement. Nhưng nó tồn tại điểm yếu chết người về vấn đề ID Switches và dự đoán đối tượng dựa trên Kalman Filter . Để giải quyết vấn đề đó thì DeepSORT được tạo ra.
Mặc dù SORT đạt được hiệu suất tổng thể tốt về precision và accuracy, nhưng như nói ở trên nó vẫn tồn tại điểm yếu quá lớn. Để cải thiện điều này tác giả DeepSORT đã tạo ra một distance metric dựa trên “appearance” của đối tượng. Để tìm hiểu sâu hơn về DeepSORT mời bạn đọc bài này và Bài này của tác giả Bùi Túng Tiền
Oke sau khi các bạn đã hiểu qua về lý thuyết thì phần dưới mới là phần chính của bài này  )
)
Build everything with some codes
Setup
Đầu tiên các bạn phải clone repo này về từ trên github để xử lý phần detection của YOLOv3:
Sau đó các bn phải down về 2 files quan trọng nhất là yolov3-tiny.cfg và yolov3-tiny.weights Tại đây. Mình chọn bản tiny vì nó nhẹ và có thể chạy trên CPU, các bạn cũng có thể chọn bản yolov3 với weight khác nếu các bạn có GPU (Nghèo nó khổ thể đấy huhu)
Sau đó bạn cấu trục thư mục như sau:
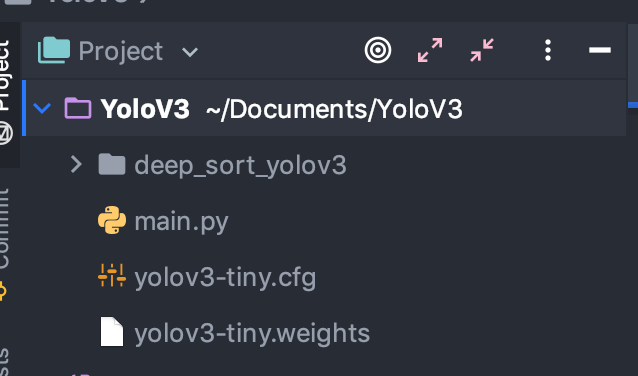
Còn một số thư viện như opencv, numpy, .... Các bạn tự setting nhé :v Chúng ta sẽ thực hiện ở file main.py , đầu tiên là implement các thư viện cần thiết để chạy:
import cv2
import numpy as np
import time
from deep_sort_yolov3.deep_sort import preprocessing
from deep_sort_yolov3.deep_sort import nn_matching
from deep_sort_yolov3.deep_sort.detection import Detection
from deep_sort_yolov3.deep_sort.tracker import Tracker
from deep_sort_yolov3.deep_sort.detection import Detection as ddet
from deep_sort_yolov3.tools import generate_detections as gdet
from collections import deque
Chú ý import cho chuẩn nhé, ko chuẩn bước này là lần sau ko chạy đc đừng có chửi mình :v Tiếp đó là ta sẽ load YOLO và khởi tạo các tham số cần thiết:
net = cv2.dnn.readNet("yolov3-tiny.weights", "yolov3-tiny.cfg")
model_filename = "./YoloV3/deep_sort_yolov3/model_data/market1501.pb"
layer_names = net.getLayerNames()
output_layers = [layer_names[i[0] - 1] for i in net.getUnconnectedOutLayers()]
max_cosine_distance = 0.5
nms_max_overlap = 0.3
classes = []
nn_budget = None
counter = []
# fps = 0.0
pts = [deque(maxlen=30) for _ in range(9999)]
COLORS = np.random.randint(0, 255, size=(200, 3),
dtype="uint8")
Ở đây mình đã dùng opencv để load weight của YOLO thay vì nó nhanh :v, các tham số như max_cosine_distance để đo khoảng cách hàng xóm gần nhất trong deepSORT và nms_max_overlap là non maximum suppression,...
Sau đó ta sẽ load model deepSORT và khởi tạo các giá trị về khoảng cách với tham số đã tạo ở trên:
encoder = gdet.create_box_encoder(model_filename, batch_size = 1) #Dữ liệu được encode của từng boxs
metric = nn_matching.NearestNeighborDistanceMetric("cosine", max_cosine_distance, nn_budget) # Dùng cosine để so sánh khoảng cách của từng boxs
tracker = Tracker(metric) # track đối tượng dược trên k/c thu được
Tiếp tục là load camera từ máy, lưu ý là nếu cam rời thìcap = cv2.VideoCapture(1) còn liền thì như dưới:
# Loading camera
cap = cv2.VideoCapture(0)
font = cv2.FONT_HERSHEY_PLAIN
starting_time = time.time()
frame_id = 0
Sau đó ta sẽ bắt từng bounding boxs được detect ra:
while True:
_, frame = cap.read()
frame_id += 1
height, width, channels = frame.shape[:3]
# Detecting objects
blob = cv2.dnn.blobFromImage(frame, 1/255, (416, 416), (0, 0, 0), True, crop=False)
net.setInput(blob)
outs = net.forward(output_layers)
# Showing informations on the screen
class_ids = []
confidences = []
bboxes = []
for out in outs:
for detection in out:
scores = detection[5:]
class_id = np.argmax(scores)
confidence = scores[class_id]
if confidence > 0.5:
# Object detected
center_x = int(detection[0] * width)
center_y = int(detection[1] * height)
w = int(detection[2] * width)
h = int(detection[3] * height)
# Rectangle coordinates
x = int(center_x - w / 2)
y = int(center_y - h / 2)
bboxes.append([x, y, w, h])
confidences.append(float(confidence))
class_ids.append(class_id)
Tất cả code phần sau vẫn là trong vòng while True: nhé
Sau khi có từng boxs đã được detect ra ta sẽ lấy ra các features qua từng frame để tracking:
#feature extraction
features = encoder(frame, bboxes)
# import pdb; pdb.set_trace()
detections = [Detection(bbox, 1.0, feature) for bbox, feature in zip(bboxes, features)]
#non-maxima supression
boxes = np.array([d.tlwh for d in detections])
scores = np.array([d.confidence for d in detections])
indices = preprocessing.non_max_suppression(boxes, nms_max_overlap, scores)
detections =[detections[i] for i in indices]
#Call the tracker
tracker.predict()
tracker.update(detections)
Ở trên với mỗi boxes thì sẽ tương ứng với các features sau khi đã detect được objects, indices là những phần tử được xử lý với non-maxima supression để lấy ra được bounding boxs tốt nhất có thể, sau ó hàm tracker.predict() có nhiệm vụ track các objects đã được dự đoán và update tiếp tục tương tự với các đối tượng khác với tracker.update(detections)
Thực hiện tracking theo IDs theo từng bounding boxs và draw boxs trên từng frames:
for track in tracker.tracks:
if not track.is_confirmed() or track.time_since_update > 1:
continue
# boxes.append([track[0], track[1], track[2], track[3]])
indexIDs.append(int(track.track_id))
counter.append(int(track.track_id))
bbox = track.to_tlbr()
color = [int(c) for c in COLORS[indexIDs[i] % len(COLORS)]]
cv2.rectangle(frame, (int(bbox[0]), int(bbox[1])), (int(bbox[2]), int(bbox[3])), (color), 3)
cv2.putText(frame, str(track.track_id), (int(bbox[0]), int(bbox[1] - 50)), 0, 5e-3 * 150, (color), 2)
i += 1
# bbox_center_point(x,y)
center = (int(((bbox[0]) + (bbox[2])) / 2), int(((bbox[1]) + (bbox[3])) / 2))
# track_id[center]
pts[track.track_id].append(center)
thickness = 5
# center point
cv2.circle(frame, (center), 1, color, thickness)
# draw motion path
for j in range(1, len(pts[track.track_id])):
if pts[track.track_id][j - 1] is None or pts[track.track_id][j] is None:
continue
thickness = int(np.sqrt(64 / float(j + 1)) * 2)
cv2.line(frame, (pts[track.track_id][j - 1]), (pts[track.track_id][j]), (color), thickness)
count = len(set(counter))
cv2.putText(frame, "Total Object Counter: " + str(count), (int(20), int(120)), 0, 5e-3 * 200, (0, 255, 0), 2)
cv2.putText(frame, "Current Object Counter: " + str(i), (int(20), int(80)), 0, 5e-3 * 200, (0, 255, 0), 2)
elapsed_time = time.time() - starting_time
fps = frame_id / elapsed_time
cv2.putText(frame, "FPS: %f" % (fps), (int(20), int(40)), 0, 5e-3 * 200, (0, 255, 0), 3)
cv2.namedWindow("YOLO3_Deep_SORT", 0)
cv2.imshow('YOLO3_Deep_SORT', frame)
key = cv2.waitKey(1)
if key == 27:
break
cap.release()
cv2.destroyAllWindows()
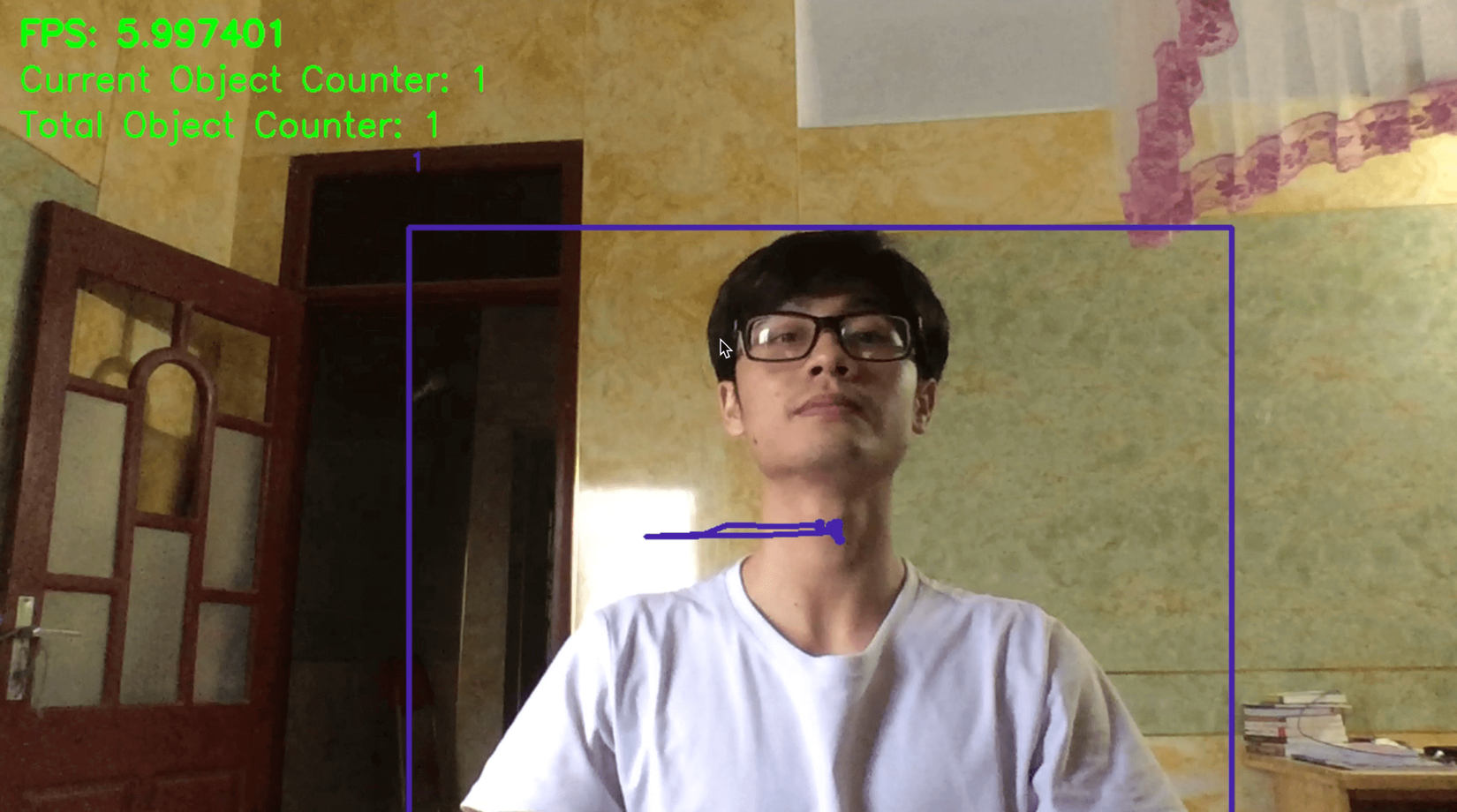
Result
Nhắc lại là ở đây mình cấu hình chạy thẳng trên CPU ở laptop của mình nên vì thế nên mới được có khoảng 6 fps nhé:
Cảm ơn các bạn đã đọc bài, nếu có gì ko hiểu thì các bạn cmt ở dưới nhé, rồi mình sẽ giải đáp sau, chúc mừng năm mới =))
All rights reserved
