
Corner Detection với OpenCV
Bài đăng này đã không được cập nhật trong 6 năm
1. Lời mở đầu
Bài toán xác định góc (corner detection) được sử dụng khá nhiếu trong các bài toán về computer vision như image matching, object detection, ...
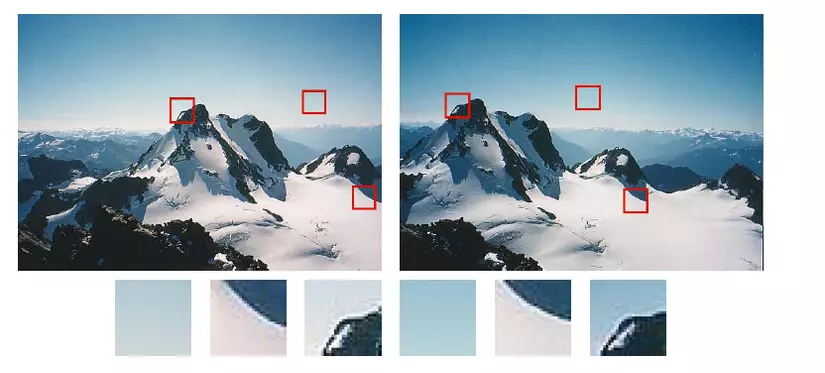
Ứng dụng của nó trong xử lý ảnh như thế nào ?. Trong các bài toán image matching, hai ảnh bên dưới là hai ảnh chụp cùng một cảnh với nhiều góc khác nhau. Khi ta muốn tìm điểm tương tự (feature point) của hai ảnh để nối ảnh, chúng ta tìm được vô vàn điểm giống nhau. Nhưng điểm nào mới là điểm quan trọng ? Giống như cách hoạt động của mắt người, khi xác định sự giống nhau giữa hai bức ảnh ta đi so sánh giữa các vị trí góc trong khi các đặc trưng về cạnh thường bị lặp lại không thể dùng làm yếu tố đặc trưng. Hoặc trong các bài toán nhận diện biển số xe, chỉ cần sự dụng thuật toán lấy bốn góc của biển số xe ta có thể nhanh chóng lấy ra vùng biển số xe nhanh hơn nhiều so với các phương pháp sử dụng Deep learning.
Corner Detection được sử dụng nhiều trong xử lý ảnh do đó hôm nay mình tiện review cho mọi người hai thuật toán phổ biến đó là Harris Corner Detection và Shi-Tomasi Corner Detection.
2. Đặc trưng góc
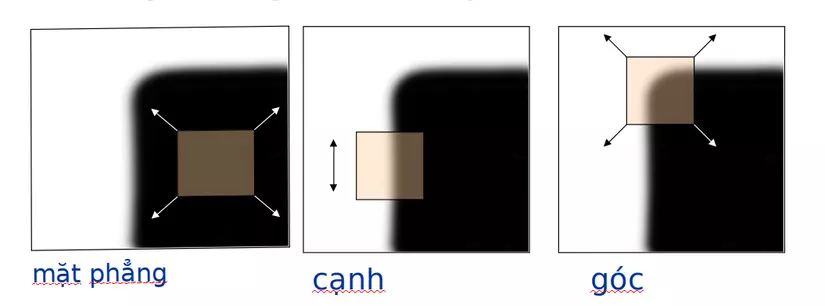
- Vùng mặt phẳng: dù có di chuyển cửa sổ theo bất cứ hướng nào thì cũng không có sự thay đổi nào về cường độ
- Vùng cạnh: nếu di chuyển cửa sổ theo chiều ngang dọc mép cạnh cũng không có sự thay đổi nào
- Vùng góc: di chuyển cửa sổ theo bất cứ hướng nào
3. Các thuật toán xác định góc (corner detection)
Do vùng góc di chuyển cửa sổ theo hướng nào thì cũng có sự thay đổi về cường độ nên để phát hiện góc ta sử dụng công thức :
 Trong đó :
Trong đó :
- w(x, y): cửa sổ trượt tại tọa độ (x, y)
- I(x +u, y + v): cường độ tại tọa độ đã dịch chuyển một khoảng (u, v)
- I(x, y): cường độ tại tọa độ điểm hiện tại
- E(u, v): sự thay đổi cường độ với cửa sổ (x, y) so với cường độ tại (x + u, y + v)
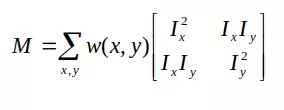
Sau đó thêm một vài bước khai triển Taylor(phần này tính toán khá dài và liên quan nhiều đến toán nên mình không giải thích sâu), ta có một biểu thức tương đương công thức bên trên như sau:
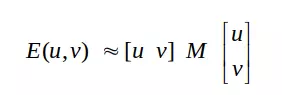
trong đó: Ix và Iy là đạo hàm theo hướng x và y tương ứng của ảnh như trong thuật toán sobel mình đã giải thích ở sobel edge detection
3.1. Harris Corner Detection
Sau khi sử dụng công thức tính thay đổi cường độ bên trên, ta có thể chọn ra những vùng có khả năng là một góc. Để đánh giá chính xác vùng đó có thật sự chứa góc hay không? Thuật toán Harris Conner Detection sử dụng một cái confidence score. lambda1, lambda2 lần lượt là giá trị eigen của ma trận M
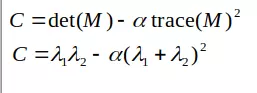
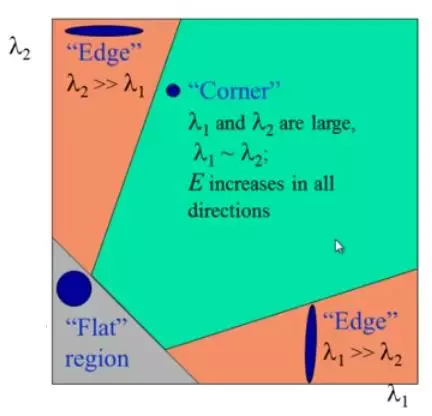
- Confidence score nhỏ khi cả lambda1 và lambda2 đều nhỏ ==> là vùng mặt phẳng
- Nếu một trong hai lambda lơn hơn cái còn lại ==> là vùng cạnh do chỉ thay đổi cường độ theo một chiều
- Nếu cả hai lambda đều có giá trị lơn thì Confidence score sẽ lớn ==> là góc do do theo hướng nào thì cường độ cũng sẽ thay đổi
Example: Chúng ta đọc ảnh và chuyển sang dạng ảnh GRAY để xử lý. Vì dst có dạng cv2.CV_32F1 nên ta ép kiểu cho gray sang float32 trước rồi mới cho vào hàm cv2.cornerHarris() của OpenCV. Với một giá trị pixel lớn hơn giá trị lớn nhất nhân với hệ số threshold ta đánh dấu bằng pixel màu đỏ. Cuối cùng ta thu được hình ảnh kết quả như bên dưới đây. Note: mình đang sử dụng jupyter notebook để demo ví dụ.
import cv2
import numpy as np
from IPython.display import Image
def detect_corner(image_path, blockSize=2, ksize=3, k=0.04, threshold=0.01):
"""
image_path: link to image
blockSize: the size of neighbourhood considered for corner detection
ksize: parameter of Sobel derivative
k: Harris detector free parameter in the equation.
"""
img = cv2.imread(image_path)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = np.float32(gray)
dst = cv2.cornerHarris(gray, blockSize, ksize, k)
#result is dilated for marking the corners, not important
dst = cv2.dilate(dst, None)
# Threshold for an optimal value, it may vary depending on the image.
img[dst>threshold*dst.max()]=[0, 0, 255]
cv2.imwrite('example.png',img)
return img
out_path = detect_corner('sudoku.png', blockSize=2, ksize=5, k=0.04, threshold=0.005)
Image(out_path)

3.2. Shi-Tomasi Corner Detection
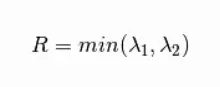
Shi-Tomasi Corner Detection chỉ khác với Harris Corner Detection tại hàm tính cofidence score. Tuy nhiên đây chính là điểm giúp cho thuật toán này có thể phát hiện vùng có khả năng là góc nhiều hơn Harris.
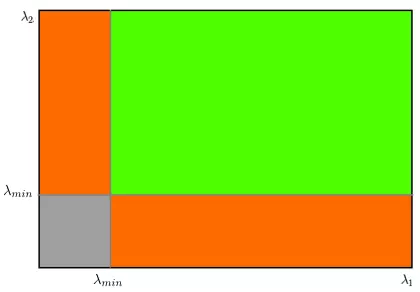
Confidenece score function(lambda1, lambda2 vẫn lần lượt các giá trị eigen value của ma trận M):
Trong OpenCV có cung cấp một hàm cv2.goodFeaturesToTrack() có thể thực hiện thuật toán này dễ dàng hơn. Chi tiết về hàm này các bạn có thể xem link ở đây. Trong bài viết này, mình chỉ giải thích lại một số tham số quan trọng :
- image: nên chuyển về dưới dạng ảnh xám để xử lý
- maxCorners: Số góc bạn mong muốn tìm thấy. Nếu số góc tìm được lớn hơn số bạn mong muốn thì sẽ trả về số góc bạn mong muốn nhưng có confidence cao nhất
- qualityLevel: tham số này nhân với điểm confidence lớn nhất của một góc tìm được tạo ra mỗi giá trị ngưỡng. Và dựa trên ngưỡng này để loại giá trị góc có điểm confidence bé hơn ngưỡng. Nếu số góc tìm được bé hơn góc mong muốn thì chỉ trả về số góc tìm được
- minDistance: khoảng cách Euclid bé nhất giữa hai góc.
Mọi người có thể điều chỉnh tham số để phù hợp cho từng bài toán và thấy rõ sự khác biệt của thuật toán
import cv2
import numpy as np
from IPython.display import Image
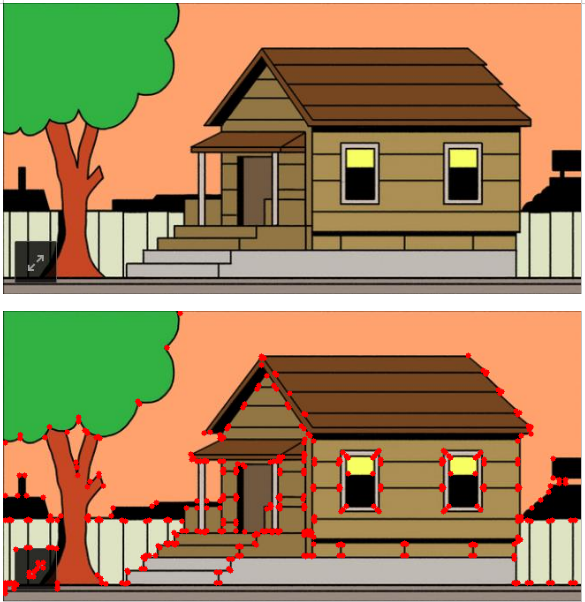
def shi_tomasi_detect_corner(img_path, maxCornerNB, qualityLevel, minDistance=0.6):
img = cv2.imread(img_path)
# convert to gray image
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# shi tomasi detect corners
corners = cv2.goodFeaturesToTrack(gray, maxCornerNB, qualityLevel, minDistance)
corners = np.int0(corners)
for i in corners:
# take (x, y) of corners
x, y = i.ravel()
# draw circle
cv2.circle(img, (x, y), 3, (0, 0, 255), -1)
cv2.imwrite('example_shitomasi.png', img)
return 'example_shitomasi.png'
img_path = shi_tomasi_detect_corner('house.jpg', 600, 0.05)
Image(img_path)
Cảm ơn mọi người đã dành thời gian đọc bài viết của mình
Tham khảo
All rights reserved
