Sử dụng CNN trong bài toán nhận dạng mặt người ( Phần 1 )
Bài đăng này đã không được cập nhật trong 4 năm
Thuật toán CNN - Convolutional Neural Network
Convolutional Neural Network (CNNs – Mạng nơ-ron tích chập) là một trong những mô hình Deep Learning tiên tiến giúp cho chúng ta xây dựng được những hệ thống thông minh với độ chính xác cao như hiện nay như hệ thống xử lý ảnh lớn như Facebook, Google hay Amazon đã đưa vào sản phẩm của mình những chức năng thông minh như nhận diện khuôn mặt người dùng, phát triển xe hơi tự lái hay drone giao hàng tự động. CNN được sử dụng nhiều trong các bài toán nhận dạng các object trong ảnh. Để tìm hiểu tại sao thuật toán này được sử dụng rộng rãi cho việc nhận dạng (detection), chúng ta hãy cùng tìm hiểu về thuật toán này.
Convolutional là gì?
Là một cửa sổ trượt (Sliding Windows) trên một ma trận như mô tả hình dưới:
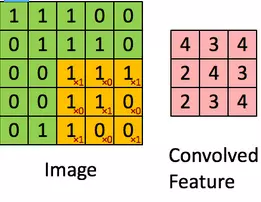
Các convolutional layer có các parameter(kernel) đã được học để tự điều chỉnh lấy ra những thông tin chính xác nhất mà không cần chọn các feature. Trong hình ảnh ví dụ trên, ma trận bên trái là một hình ảnh trắng đen được số hóa. Ma trận có kích thước 5x5 và mỗi điểm ảnh có giá trị 1 hoặc 0 là giao điểm của dòng và cột. Convolution hay tích chập là nhân từng phần tử trong ma trận 3. Sliding Window hay còn gọi là kernel, filter hoặc feature detect là một ma trận có kích thước nhỏ như trong ví dụ trên là 3x3. Convolution hay tích chập là nhân từng phần tử bên trong ma trận 3x3 với ma trận bên trái. Kết quả được một ma trận gọi là Convoled feature được sinh ra từ việc nhận ma trận Filter với ma trận ảnh 5x5 bên trái.
Cấu trúc của mạng CNN
-
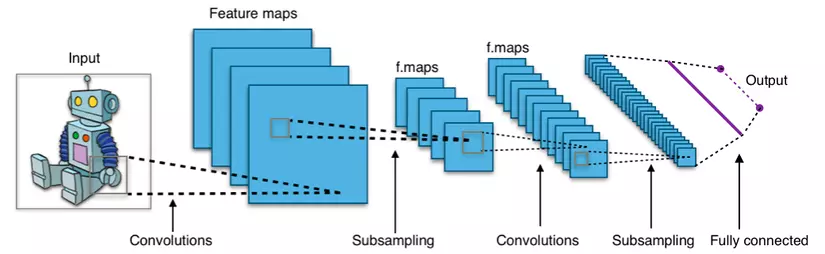
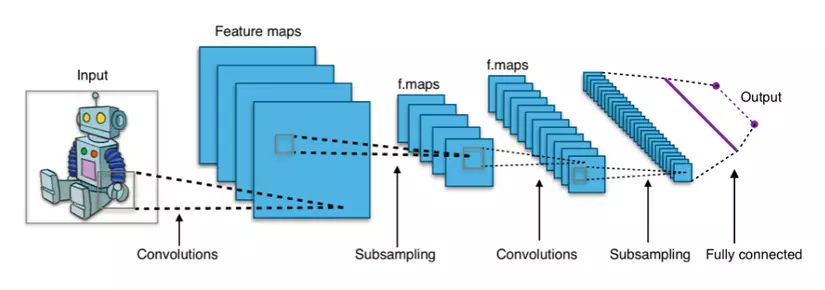
Mạng CNN là một tập hợp các lớp Convolution chồng lên nhau và sử dụng các hàm nonlinear activation như ReLU và tanh để kích hoạt các trọng số trong các node. Mỗi một lớp sau khi thông qua các hàm kích hoạt sẽ tạo ra các thông tin trừu tượng hơn cho các lớp tiếp theo. Mỗi một lớp sau khi thông qua các hàm kích hoạt sẽ tạo ra các thông tin trừu tượng hơn cho các lớp tiếp theo. Trong mô hình mạng truyền ngược (feedforward neural network) thì mỗi neural đầu vào (input node) cho mỗi neural đầu ra trong các lớp tiếp theo. Mô hình này gọi là mạng kết nối đầy đủ (fully connected layer) hay mạng toàn vẹn (affine layer). Còn trong mô hình CNNs thì ngược lại. Các layer liên kết được với nhau thông qua cơ chế convolution. Layer tiếp theo là kết quả convolution từ layer trước đó, nhờ vậy mà ta có được các kết nối cục bộ. Như vậy mỗi neuron ở lớp kế tiếp sinh ra từ kết quả của filter áp đặt lên một vùng ảnh cục bộ của neuron trước đó.
-
Mỗi một lớp được sử dụng các filter khác nhau thông thường có hàng trăm hàng nghìn filter như vậy và kết hợp kết quả của chúng lại. Ngoài ra có một số layer khác như pooling/subsampling layer dùng để chắt lọc lại các thông tin hữu ích hơn (loại bỏ các thông tin nhiễu). Trong quá trình huấn luyện mạng (traning) CNN tự động học các giá trị qua các lớp filter dựa vào cách thức mà bạn thực hiện. Ví dụ trong tác vụ phân lớp ảnh, CNNs sẽ cố gắng tìm ra thông số tối ưu cho các filter tương ứng theo thứ tự raw pixel > edges > shapes > facial > high-level features. Layer cuối cùng được dùng để phân lớp ảnh.
-
Trong mô hình CNN có 2 khía cạnh cần quan tâm là tính bất biến (Location Invariance) và tính kết hợp (Compositionality). Với cùng một đối tượng, nếu đối tượng này được chiếu theo các gốc độ khác nhau (translation, rotation, scaling) thì độ chính xác của thuật toán sẽ bị ảnh hưởng đáng kể. Pooling layer sẽ cho bạn tính bất biến đối với phép dịch chuyển (translation), phép quay (rotation) và phép co giãn (scaling). Tính kết hợp cục bộ cho ta các cấp độ biểu diễn thông tin từ mức độ thấp đến mức độ cao và trừu tượng hơn thông qua convolution từ các filter. Đó là lý do tại sao CNNs cho ra mô hình với độ chính xác rất cao. Cũng giống như cách con người nhận biết các vật thể trong tự nhiên.
-
Mạng CNN sử dụng 3 ý tưởng cơ bản:
- các trường tiếp nhận cục bộ (local receptive field)
- trọng số chia sẻ (shared weights)
- tổng hợp (pooling).
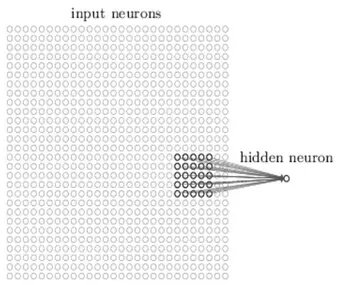
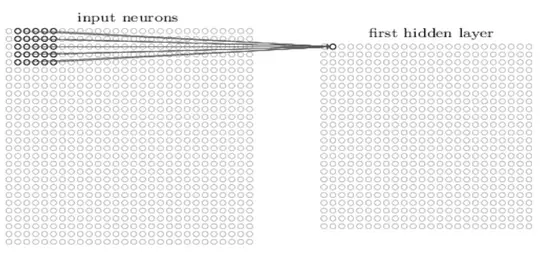
Trường tiếp nhận cục bộ (local receptive field)
Đầu vào của mạng CNN là một ảnh. Ví dụ như ảnh có kích thước 28x28 thì tương ứng đầu vào là một ma trận có 28x28 và giá trị mỗi điểm ảnh là một ô trong ma trận. Trong mô hình mạng ANN truyền thống thì chúng ta sẽ kết nối các neuron đầu vào vào tầng ảnh. Tuy nhiên trong CNN chúng ta không làm như vậy mà chúng ta chỉ kết nối trong một vùng nhỏ của các neuron đầu vào như một filter có kích thước 5x5 tương ứng (28- 5 + 1) 24 điểm ảnh đầu vào. Mỗi một kết nối sẽ học một trọng số và mỗi neuron ẩn sẽ học một bias. Mỗi một vùng 5x5 đấy gọi là một trường tiếp nhận cục bộ.
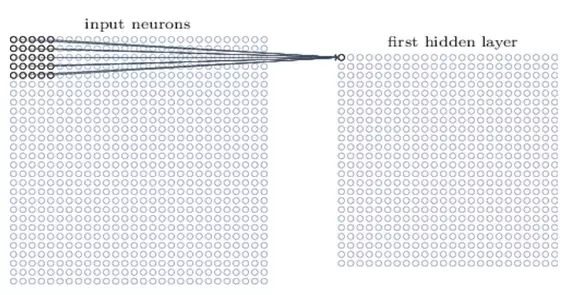
Một cách tổng quan, ta có thể tóm tắt các bước tạo ra 1 hidden layer bằng các cách sau:
-
Tạo ra neuron ẩn đầu tiên trong lớp ẩn 1
-
Dịch filter qua bên phải một cột sẽ tạo được neuron ẩn thứ 2.
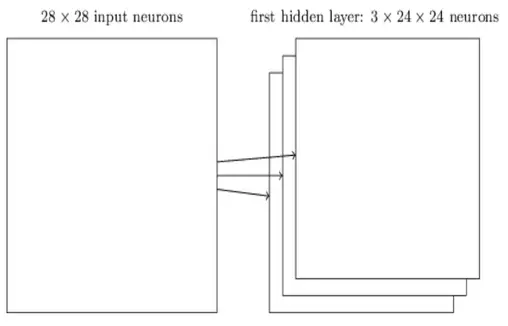
Đối với bài toán nhận dạng ảnh người ta thường gọi ma trận lớp đầu vào là feature map, trọng số xác định các đặc trương là shared weight và độ lệch xác định một feature map là shared bias.
Như vậy đơn giản nhất là qua các bước trên chúng ta chỉ có 1 feature map. Tuy nhiên trong nhận dạng ảnh chúng ta cần nhiều hơn một feature map.
Như vậy, local receptive field thích hợp cho việc phân tách dữ liệu ảnh, giúp chọn ra những vùng ảnh có giá trị nhất cho việc đánh giá phân lớp.
Trọng số chia sẻ (shared weight and bias)
Đầu tiên, các trọng số cho mỗi filter (kernel) phải giống nhau. Tất cả các nơ-ron trong lớp ẩn đầu sẽ phát hiện chính xác feature tương tự chỉ ở các vị trí khác nhau trong hình ảnh đầu vào. Chúng ta gọi việc map từ input layer sang hidden layer là một feature map. Vậy mối quan hệ giữa số lượng Feature map với số lượng tham số là gì?
- Chúng ta thấy mỗi fearture map cần 25 = 5x5 shared weight và 1 shared bias. Như vậy mỗi feature map cần 5x5+1 = 26 tham số. Như vậy nếu có 10 feature map thì có 10x26 = 260 tham số. Chúng ta xét lại nếu layer đầu tiên có kết nối đầy đủ nghĩa là chúng ta có 28x28=784 neuron đầu vào như vậy ta chỉ có 30 neuron ẩn. Như vậy ta cần 28x28x30 shared weight và 30 shared bias. Tổng số tham số là 28x28x30+30 tham số lớn hơn nhiều so với CNN. Ví dụ vừa rồi chỉ mô tả để thấy được sự ước lượng số lượng tham số chứ chúng ta không so sánh được trực tiếp vì 2 mô hình khác nhau. Nhưng điều chắc chắn là nếu mô hình có số lượng tham số ít hơn thì nó sẽ chạy nhanh hơn.
Tóm lại, một convolutional layer bao gồm các feature map khác nhau. Mỗi một feature map giúp detect một vài feature trong bức ảnh. Lợi ích lớn nhất của trọng số chia sẻ là giảm tối đa số lượng tham số trong mạng CNN.
Lớp tổng hợp (pooling layer)
Lớp pooling thường được sử dụng ngay sau lớp convulational để đơn giản hóa thông tin đầu ra để giảm bớt số lượng neuron.
Thủ tục pooling phổ biến là max-pooling, thủ tục này chọn giá trị lớn nhất trong vùng đầu vào 2x2.
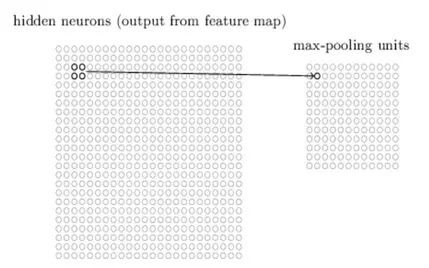 Như vậy qua lớp Max Pooling thì số lượng neuron giảm đi phân nửa. Trong một mạng CNN có nhiều Feature Map nên mỗi Feature Map chúng ta sẽ cho mỗi Max Pooling khác nhau. Chúng ta có thể thấy rằng Max Pooling là cách hỏi xem trong các đặc trưng này thì đặc trưng nào là đặc trưng nhất. Ngoài Max Pooling còn có L2 Pooling.
Như vậy qua lớp Max Pooling thì số lượng neuron giảm đi phân nửa. Trong một mạng CNN có nhiều Feature Map nên mỗi Feature Map chúng ta sẽ cho mỗi Max Pooling khác nhau. Chúng ta có thể thấy rằng Max Pooling là cách hỏi xem trong các đặc trưng này thì đặc trưng nào là đặc trưng nhất. Ngoài Max Pooling còn có L2 Pooling.
Cuối cùng ta đặt tất cả các lớp lại với nhau thành một CNN với đầu ra gồm các neuron với số lượng tùy bài toán.
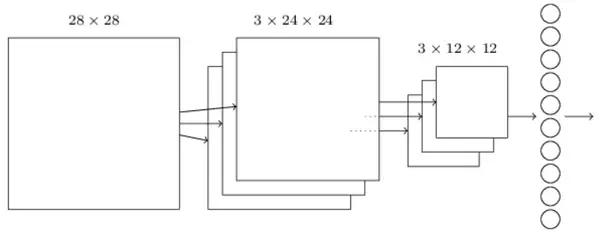
2 lớp cuối cùng của các kết nối trong mạng là một lớp đầy đủ kết nối (fully connected layer) . Lớp này nối mọi nơron từ lớp max pooled tới mọi nơron của tầng ra.
Cách chọn tham số cho CNN
- Số các convolution layer: càng nhiều các convolution layer thì performance càng được cải thiện. Sau khoảng 3 hoặc 4 layer, các tác động được giảm một cách đáng kể
- Filter size: thường filter theo size 5x5 hoặc 3x3
- Pooling size: thường là 2x2 hoặc 4x4 cho ảnh đầu vào lớn
- Cách cuối cùng là thực hiện nhiều lần việc train test để chọn ra được param tốt nhất.
Trong phần 2, chúng ta sẽ áp dụng các lý thuyết trên vào bài toán nhận diện mặt người tham khảo chính: http://www.wildml.com/2015/11/understanding-convolutional-neural-networks-for-nlp/
All rights reserved
